Profile
- Profile
-
元田 智大
MOTODA Tomohiro - Affiliation
-
大阪大学大学院 基礎工学研究科
システム創成専攻システム科学領域
原田研究室博士後期課程1年
- Program
-
(国際共創大学院学位プログラム推進機構)
ヒューマンウェアイノベーション博士課程プログラム
個人自己紹介ページ(外部リンク)


Education
| 2011-2014 | 大阪府立三国丘高等学校普通科 |
| 2014-2018 | 大阪大学基礎工学部システム科学科(知能システム学コース) |
| 2018-2020 | 大阪大学大学院基礎工学研究科システム創成専攻システム科学領域 博士前期課程 |
| 2020- | 大阪大学大学院基礎工学研究科システム創成専攻システム科学領域 博士後期課程 |
Research
複雑なばら積みされる物体の観測と操作の繰り返しをコントロール
今は「ばら積みピッキング」と呼ばれる作業の自動化を見据えた課題に取り組んでいます. 複雑に積み上げられた物体に対しては,どうやって操作すればいいのか?ビジョンセンサの情報が不足しているのか?など課題は山積です. そんな課題に「山崩し(将棋崩し)」というゲームに焦点を当て,その実現を目指しています.山崩しを実現するための確率的動作計画の提案
山崩し(将棋崩し)とは,ランダムに積み上げられた将棋の駒の山を崩さないように1本の指で押し当てたり, 引き出したりしながら駒を取り出していくゲームです.これを実現するためには, 駒の姿勢推定のための観測ならびに正確に駒をスライドさせて取り出す操作の双方の戦略が必須です.物体を操作するときには,よく見える位置から観測を行う,適当な取り出し方を選ぶ等を考慮しなければなりません. そのために,物体の操作を想定した観測と姿勢推定を含めた適切な取り出し方法の選択手法を提案します.本研究では, POMDPs(部分観測マルコフ決定過程)と呼ばれる手法を用いて,センシングを行いながらロボットの行動を決定し, 複雑な行動が求められるようなタスクの自動化を目指します.

図:動作計画フローチャート
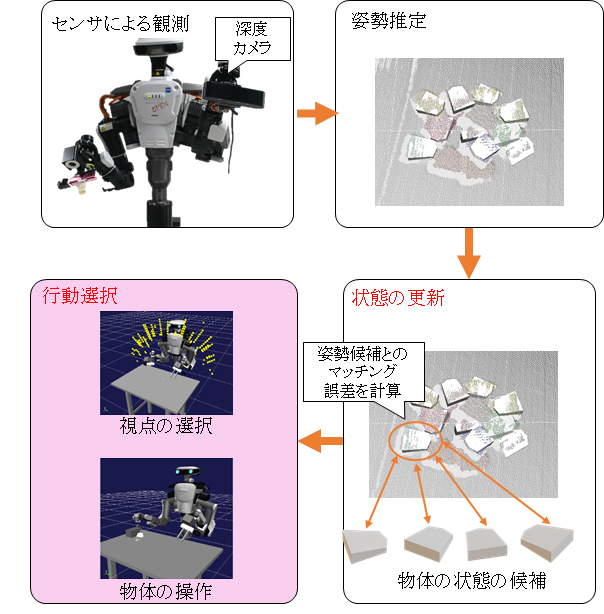
図:状態推定の概要
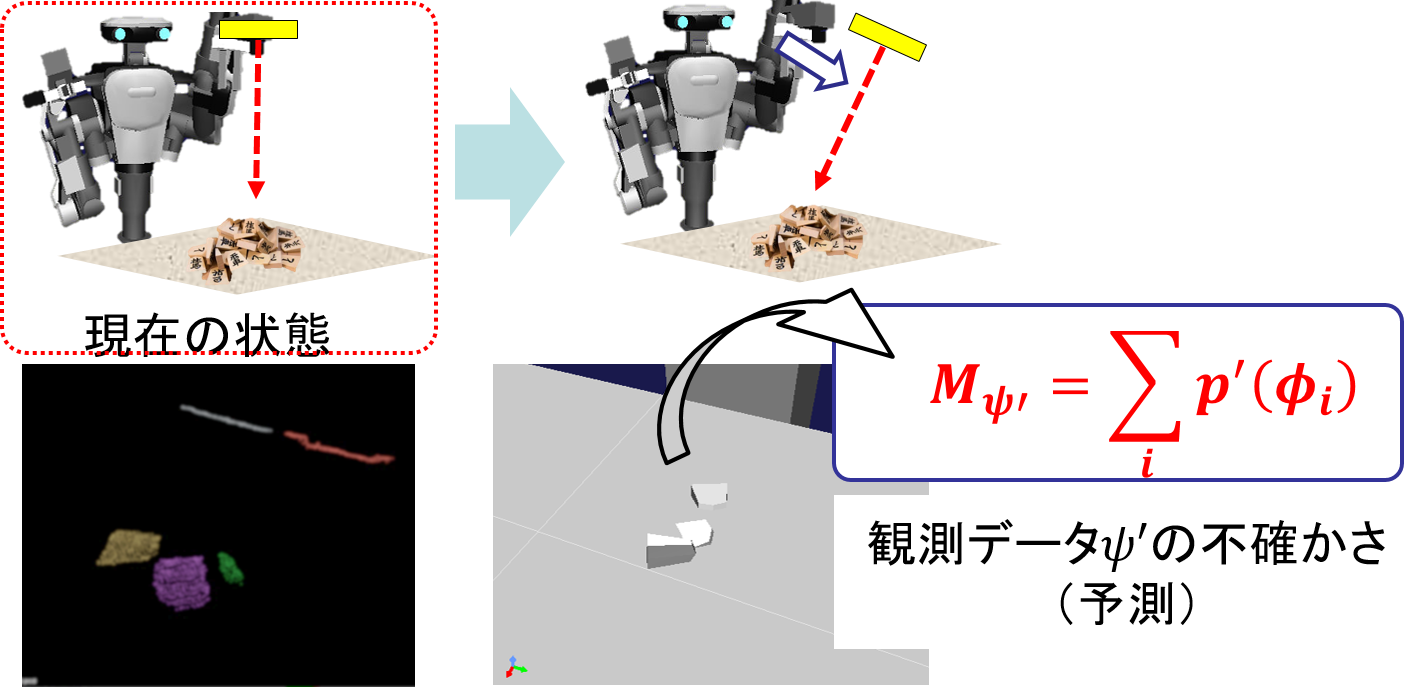
図:視点の選択方法-1
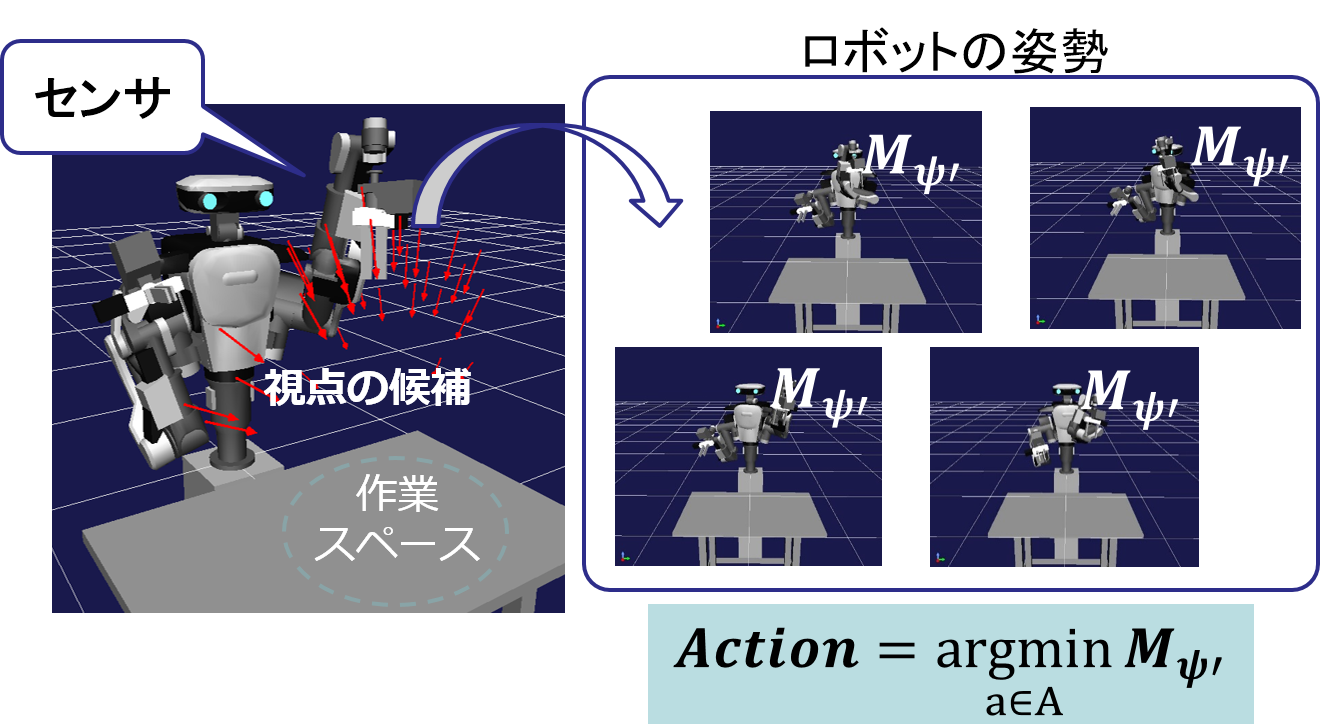
図:視点の選択方法-2
